1
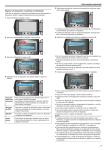
Sistemas Hiperbólicos de Navegação 36 SISTEMAS HIPERBÓLICOS DE NAVEGAÇÃO 36.1 NAVEGAÇÃO HIPERBÓLICA A navegação hiperbólica utiliza o método de medida da diferença de distâncias a determinados pontos (estações do sistema) para obtenção das linhas de posição (LDP) que definem a posição do navio. Os sistemas eletrônicos de posicionamento baseados em terra (“land based positioning systems”) que estudaremos a seguir utilizam o método hiperbólico para determinação das LDP, por diferença de fase, como o sistema Decca, ou por diferença de tempo, como o LORAN-C. Figura 36.1 – Hipérbole Uma hipérbole é o lugar geométrico dos pontos cuja diferença de distâncias a dois pontos fixos é constante. A figura 36.1 mostra uma hipérbole cujos focos são F e F'. Em cada ponto dos dois ramos da hipérbole, as diferenças das distâncias aos focos é constante. Assim, na figura 36.1: MF – MF' = M'F – M'F' = constante Navegação eletrônica e em condições especiais 1309 Sistemas Hiperbólicos de Navegação A distância entre os focos da hipérbole é denominada distância focal; o segmento que une os focos F e F' é denominado, em navegação, de linha base; a extensão da linha focal toma o nome de prolongamento da linha base; a perpendicular a meio da distância focal (yy') é denominada de mediatriz do segmento focal. O modo mais prático de construção geométrica de uma hipérbole consiste em, plotados os focos, traçar, em escala, circunferências com centros nos focos, cujos raios aumentem gradualmente, em uma proporção constante (figura 36.2). As circunferências, então, indicam as distâncias aos focos. Para o traçado da hipérbole, escolhem-se os pontos de interseção de duas circunferências cujos raios difiram entre si do valor constante desejado. Figura 36.2 – Construção Geométrica de uma Hipérbole e Para o traçado do ramo da hipérbole A da figura 36.2, escolhemos uma diferença constante de distâncias aos focos igual a 2 unidades. Assim, no ponto a, a distância ao foco F é igual a 7 unidades e a distância ao foco F' igual a 5, sendo, portanto, a diferença das distâncias igual a 2; no ponto b, a distância a F é de 6 unidades e a distância a F' é de 4 unidades, o que significa uma diferença de distâncias também igual a 2; o mesmo ocorre nos pontos c, d e nos demais pontos da hipérbole A; em todos eles, a diferença das distâncias aos focos é de 2 unidades, como mostrado na tabela a seguir: 1310 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação VALORES DOS RAIOS PONTO Circunferência com centro em F Circunferência com centro em F' DIFERENÇA a 7 5 2 b 6 4 2 c 5 3 2 d 4 2 2 A hipérbole C, também traçada na figura 36.2, corresponde a uma diferença de distâncias constante, igual a 4 unidades. Analisando essa figura, conclui-se que, quando a diferença constante das distâncias é pequena, a hipérbole se localiza próximo à mediatriz e é bastante aberta; ao contrário, quando a diferença constante das distâncias cresce, os ramos da hipérbole se aproximam dos focos e a curvatura aumenta (como mostrado na hipérbole C da figura 36.2); a mediatriz corresponde a uma diferença de distâncias constante igual a zero. A compreensão do traçado e das propriedades de uma hipérbole auxiliam o entendimento dos princípios em que se baseia a navegação hiperbólica. 36.2 CONSTRUÇÃO DE UM PADRÃO HIPERBÓLICO. AMBIGÜIDADE DAS TRANSMISSÕES SIMULTÂNEAS Seja a figura 36.3, onde nos focos da hipérbole estão situados dois transmissores, A e B, que, de forma sincronizada, emitem ao mesmo tempo um sinal rádio. Ao emitirem, as ondas se propagam em todas as direções e as circunferências traçadas na figura indicam as distâncias alcançadas em intervalos de 100 microssegundos (100 ms). Como vimos, a velocidade de propagação das ondas eletromagnéticas na atmosfera é de, aproximadamente, 300.000 km/s, ou cerca de 162.000 milhas náuticas por segundo. Assim, a onda hertziana percorre 0,162 milha náutica por microssegundo, ou 16,2 milhas em 100 ms. Isto significa que, na figura 36.3, o intervalo de 100 ms entre as circunferências traçadas corresponde a 16,2 milhas náuticas. Então, como a velocidade de propagação das ondas de rádio no ar é aproximadamente constante, a uma distância percorrida pelo sinal transmitido corresponderá um certo intervalo de tempo, e vice-versa. Além disso, uma diferença de distâncias corresponderá a um determinado intervalo de tempo. Tendo em vista este conceito e recordando as propriedades de uma hipérbole, podemos definir como hipérbole de posição, em radionavegação: HIPÉRBOLE DE POSIÇÃO É o lugar geométrico das posições do observador onde o intervalo de tempo entre a recepção de sinais rádio transmitidos simultaneamente por duas estações fixas é constante. Navegação eletrônica e em condições especiais 1311 Sistemas Hiperbólicos de Navegação Figura 36.3 – Construção de um Padrão Hiperbólico Na figura 36.3, na hipérbole M, considerem-se os pontos a e b. O sinal rádio, para se propagar do transmissor A ao ponto a, gasta 600 ms; por outro lado, o sinal rádio gasta 900 ms para se propagar do transmissor B ao mesmo ponto a. Assim, se os dois sinais fossem emitidos simultaneamente, um receptor no ponto a receberia o sinal do transmissor A 300 ms antes de receber o sinal do transmissor B. No ponto b da hipérbole M, teríamos: – do transmissor A para o receptor b, o sinal gasta .... 400 ms – do transmissor B para o receptor b, o sinal gasta .... 700 ms diferença de tempo ........................................................... 300 ms Portanto, obteremos diferenças de tempo constantes para todos os pontos da hipérbole M. Assim, se a bordo existir um radiorreceptor com um dispositivo capaz de medir o intervalo de tempo entre a recepção dos sinais emitidos simultaneamente por A e B, poderemos determinar a hipérbole de posição do navio. Contudo, uma hipérbole é composta por dois ramos simétricos e a ambos corresponderá a mesma diferença de distâncias, ou o mesmo intervalo de tempo. Na figura 36.3, os ramos hiperbólicos M e N correspondem a uma diferença de tempo de 300 microssegundos. 1312 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação Como o receptor é capaz apenas de medir o intervalo de tempo entre a recepção dos dois sinais, ficaria introduzida uma ambigüidade no sistema, não havendo meio de distinguir se o navio se encontra sobre o ramo hiperbólico M ou N. A figura 36.4 ilustra outra situação, onde, além da mediatriz A, estão traçadas cinco hipérboles, cada uma com seus dois ramos simétricos. Temos, então, as seguintes diferenças de tempo correspondentes: · ramos hiperbólicos B e G ................................................ 300 ms · ramos hiperbólicos C e H ................................................ 600 ms · ramos hiperbólicos D e I ................................................. 900 ms · ramos hiperbólicos E e J .............................................. 1.200 ms · ramos hiperbólicos F e L .............................................. 1.500 ms Figura 36.4 – Padrão Hiperbólico Mostrando Ambigüidades Desta forma, quando as transmissões são simultâneas, existem ambigüidades. Para resolver as ambigüidades descritas, a maioria dos sistemas hiperbólicos de navegação usa o processo de escalonamento das emissões, agrupando as transmissões em redes de três ou quatro estações. Em uma rede, uma estação transmite primeiro e as demais só emitem os respectivos sinais ao receberem a onda de rádio emitida pela primeira estação. Vejamos como isto elimina a ambigüidade. Na figura 36.5, as circunferências de distância/tempo traçadas estão espaçadas de 100 ms. Verifica-se, portanto, que as estações representadas estão espaçadas de 400 ms, Navegação eletrônica e em condições especiais 1313 Sistemas Hiperbólicos de Navegação ou seja, o sinal rádio transmitido por uma delas gasta 400 ms para se propagar até a outra. Inicialmente, uma das estações, denominada de Mestra (M), emite seu sinal. Só quando ele for recebido na outra estação, que se denomina Escrava, Remota ou Secundária (S), é que esta emitirá o respectivo sinal. Então, no exemplo da figura, a estação S só transmitirá o seu sinal 400 ms depois da emissão do sinal da estação M, isto é, haverá um atraso de 400 ms na transmissão da estação S. Logo, para um ponto d, no ramo hiperbólico D (figura 36.5), tem-se: · o sinal de M gasta para alcançar d .......................... 300 ms · o sinal de S gasta para alcançar d ........................... 600 ms · atraso na transmissão do sinal de S ........................ 400 ms diferença de tempo ..................................................... 700 ms Da mesma forma, para um ponto c, no ramo hiperbólico C, tem-se: · o sinal de M gasta para alcançar c .......................... 400 ms · o sinal de S gasta para alcançar c ........................... 600 ms · atraso na transmissão do sinal de S ........................ 400 ms diferença de tempo ..................................................... 600 ms Figura 36.5 – Padrão Hiperbólico com Escalonamento das Transmissões 1314 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação Raciocínios semelhantes nos permitiriam montar a seguinte tabela de diferenças de tempo: HIPÉRBOLE DE POSIÇÃO DIFERENÇA DE TEMPO D 700 ms C 600 ms B 500 ms A 400 ms E 300 ms F 200 ms G 100 ms Assim, está eliminada a ambigüidade, pois ramos hiperbólicos simétricos corresponderão a intervalos de tempo diferentes. Por exemplo, os ramos simétricos D e G correspondem, respectivamente, a intervalos de tempo de 700 ms e 100 ms. Na prática, como o transmissor da estação Escrava, ou Secundária (S), leva algum tempo para ser disparado após receber o sinal da Mestra (M), além de não ser aconselhável trabalhar com intervalos de tempo muito pequenos, é somado ao tempo que o sinal M gasta para alcançar S um intervalo de tempo fixo, denominado atraso de código. Se, por exemplo, este atraso de código for 50 microssegundos, somado ao tempo gasto para o sinal de M alcançar S (400 ms) resultará em um atraso total de 450 ms. Então, as leituras nas hipérboles de posição ficariam conforme apresentado na figura 36.6. Figura 36.6 – Padrão Hiperbólico com Escalonamento e Atraso de Código Navegação eletrônica e em condições especiais 1315 Sistemas Hiperbólicos de Navegação Conforme vimos, na navegação hiperbólica a linha que une duas estações (MS) é denominada de linha base; suas extensões para ambos os lados das estações tomam o nome de prolongamento da linha base. O espaçamento entre duas hipérboles traçadas no padrão chama-se corredor (“lane”). 36.3 SISTEMAS HIPERBÓLICOS DE NAVEGAÇÃO Para se obter um ponto é necessário que sejam determinadas duas linhas de posição (LDP) hiperbólicas. A posição do navio estará no cruzamento das duas LDP. É preciso, portanto, dois grupos de estações. Na prática, usa-se uma estação Mestra controlando duas Secundárias ou Escravas. Para que se observem as diferenças de tempo entre as recepções dos sinais dos dois grupos, variam-se as freqüências ou os atrasos de código. Na figura 36.7, está plotado o padrão hiperbólico de uma rede constituída por três estações: a Mestra A e duas Escravas, ou Secundárias, B e C. As duas famílias de LDP hiperbólicas A – B e A – C constituem o quadriculado hiperbólico traçado na carta. No exemplo indicado na figura, o receptor do sistema de navegação hiperbólica determinou duas diferenças de tempo de recepção de sinais: A – B = 59,5 ms e A – C = 18,0 ms. Como as hipérboles correspondentes a estes valores não estão traçadas na carta, foram feitas as interpolações correspondentes, representadas por linhas tracejadas. O cruzamento das duas LDP hiperbólicas fornece a posição do navio, como mostrado na figura. Figura 36.7 – Quadriculado Hiperbólico de uma Rede de Três Estações: Uma Mestra (A) Comandando Duas Escravas (B e C) 1316 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação Um sistema hiperbólico de navegação pode usar a medida do intervalo de tempo de recepção de sinais, conforme acima descrito, ou a comparação da fase de sinais de onda contínua transmitidos pelas estações de terra. Os sistemas para navegação marítima que estudaremos empregam ambos os métodos: o LORAN-C utiliza a medida do intervalo de tempo; o sistema Decca se baseia na medida da diferença de fase para determinação das LDP. 36.4 PRECISÃO DE UMA LDP HIPERBÓLICA A precisão de uma linha de posição (LDP) hiperbólica dependerá dos seguintes fatores: (1) Exatidão com que é medido o intervalo de tempo ou a diferença de fase dos sinais recebidos; (2) sincronia entre as estações transmissoras; (3) precisão nas previsões de propagação das ondas de rádio; (4) qualidade do receptor e experiência do operador; (5) posição relativa entre o navio e as estações transmissoras (geometria da posição); e (6) precisão da tábua ou carta usada (incluindo a precisão das posições das estações do sistema). Vejamos um sumário da influência de cada um desses fatores: (1) A exatidão com que o equipamento é capaz de medir o intervalo de tempo, ou a diferença de fase, entre os sinais recebidos é fundamental para a precisão da LDP. Como vimos, a velocidade de propagação das ondas de rádio na atmosfera é de cerca de 0,162 milha náutica por microssegundo. Assim, para que a LDP tenha uma precisão de 0,1 milha, a medição do intervalo de tempo deve ser feita com uma exatidão de 0,6 ms, ou seja, para cada 0,6 ms de erro na leitura, teremos um erro de 0,1 milha na LDP. A medição da diferença de fase deve ser feita com precisão semelhante. (2) A sincronia entre as transmissões também é essencial. As estações devem transmitir rigorosamente dentro do escalonamento de emissões planejado para o sistema, a fim de garantir a exatidão das LDP. A sincronização das transmissões é assegurada por padrões atômicos de tempo, altamente precisos. (3) A previsão da propagação significa tanto a velocidade como o trajeto das ondas de rádio entre a estação transmissora, em terra, e o receptor, a bordo do navio ou embarcação. No traçado das hipérboles nas cartas, ou na construção de tábuas, assumemse condições atmosféricas padrões, que proporcionarão uma propagação padrão. Se as condições se afastam dos parâmetros padrões considerados, serão introduzidos erros nas LDP. Cada sistema usa seu método próprio para identificar e corrigir esses erros. (4) As qualidades do receptor são sua sensibilidade, sua seletividade e o seu nível de ruído, que deve ser o mais baixo possível, para que se possam tomar as leituras com exatidão. Os receptores de navegação hiperbólica atendem, em sua maioria, a esses requisitos. Quanto à experiência do operador, refere-se à sua capacidade de fazer leituras precisas. Navegação eletrônica e em condições especiais 1317 Sistemas Hiperbólicos de Navegação Muitos equipamentos de navegação hiperbólica dispõem atualmente de receptores que executam leitura automática e apresentação da LDP em forma digital, eliminando a necessidade de maior experiência de operação. Outros, ainda, utilizam um microcomputador incorporado, fornecendo automaticamente a posição do navio, em Latitude e Longitude. (5) A precisão de uma LDP hiperbólica depende, também, da posição do navio (receptor) em relação às estações transmissoras, ou seja, depende da posição do receptor dentro do padrão hiperbólico. A precisão é tanto maior quanto menor for a largura do corredor (espaçamento entre duas hipérboles consecutivas traçadas na carta). Para qualquer padrão hiperbólico, os corredores se estreitam mais sobre a linha base; portanto, é sobre ela que se dá o máximo de precisão. No prolongamento da linha base e nas suas vizinhanças, por outro lado, é que se situam as áreas de menor precisão, de modo que, geralmente, estas regiões do padrão hiperbólico são evitadas. Na prática, são utilizados apenas 2 setores do padrão, com 120º cada um, para cada lado da linha base, como indicado na figura 36.8. Na determinação da posição são empregadas, pelo menos, duas LDP. Assim, a precisão do ponto dependerá, além dos fatores que influenciam a exatidão das LDP de per si, do ângulo de corte entre as hipérboles, isto é, da geometria da situação. Para uma posição obtida por duas LDP, ângulos de interseção menores que 30º devem ser evitados, tal como na navegação costeira ou astronômica. (6) A precisão também depende da acurácia com que se conhecem as coordenadas das estações transmissoras e da exatidão das tábuas ou cartas usadas com o sistema. Figura 36.8 – Setores Utilizáveis do Padrão Hiperbólico Em virtude de todos esses fatores, é prudente considerar para a posição hiperbólica, não apenas um ponto, mas sim uma área em torno da interseção das duas hipérboles de posição. Tal área será função da precisão considerada na obtenção da LDP e do ângulo de corte entre elas (figura 36.9). Adota-se como posição o Figura 36.9 – Posição Hiperbólica (Área de Incerteza) (a) ERRO DE 1' EM CADA LDP ÂNGULO DE CORTE @ 90º (NAVIO PRÓXIMO ÀS ESTAÇÕES) 1318 (b) ERRO DE 1' EM CADA LDP ÂNGULO DE CORTE @ 30º (NAVIO DISTANTE DAS ESTAÇÕES) Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação vértice mais desfavorável do quadrilátero formado, ou seja, o que coloque o navio em pior situação do ponto de vista da segurança da navegação. 36.5 PADRÃO HIPERBÓLICO PELA MEDIDA DA DIFERENÇA DE FASES A figura 36.10 representa um padrão hiperbólico referente às estações M e S. Nele, o espaçamento entre as circunferências de distância traçadas é igual a 1 comprimento de onda (l) das transmissões das estações. Além disso, para facilitar o estudo, considera-se que a linha base corresponde a um número inteiro de comprimentos de onda, que as duas estações operam na mesma freqüência e transmitem sincronizadamente. Figura 36.10 – Padrão Formado por Hiperbóles de Diferença de Fase Igual a Zero Verifica-se na figura que, sobre a linha base, os pontos de diferença de fase igual a zero ocorrem a intervalos de meio comprimento de onda. Nos pontos fora da linha base que distam de ambas as estações números inteiros de comprimento de onda, ou números inteiros mais meio comprimento de onda, também a diferença de fase será zero. Assim, no ponto b da figura 36.10, cuja distância da estação M é de 3 comprimentos de onda e da estação S é de 4 comprimentos de onda, a diferença de fase é zero. Navegação eletrônica e em condições especiais 1319 Sistemas Hiperbólicos de Navegação Nos sistemas que empregam diferença de fase, o espaçamento entre duas hipérboles de diferença de fase igual a zero denomina-se corredor (“lane”). Sobre a linha base, um corredor corresponde a meio comprimento de onda. À medida que se afasta da linha base, este valor aumenta, como se pode verificar na figura 36.10. As diferenças de fase dentro de um corredor podem ser visualizadas na figura 36.11. Desta forma, se o sistema de navegação for capaz de medir a diferença de fase entre os dois sinais, ficará definida uma LDP dentro do corredor em que estiver o navio. Figura 36.11 – Diferenças de Fase Dentro de um Corredor DIF FASE: Para que se possa determinar a diferença de fase, os sinais têm que ser recebidos separadamente, a fim de que sejam medidas as fases e obtida a diferença. Isto pode ser feito de duas maneiras: ou as estações operam na mesma freqüência, mas emitem em seqüência, ou operam em freqüências diferentes, sendo uma múltipla da outra. O sistema Decca, que usa o método de medida da diferença de fases, emprega transmissões em freqüências diferentes. O sistema Omega utilizava uma mesma freqüência, em transmissões escalonadas. Para dar uma idéia da precisão das LDP obtidas por medida da diferença de fase, tomemos como exemplo o sistema Omega, que operava na freqüência básica de 10,2 kHz. Logo, como l = l= C , teremos: f 300.000 = 29.411,764 metros 10,2 Assim, sobre a linha base, os corredores apresentam um comprimento de 14.705,882 metros, correspondente a meio comprimento de onda (l/2). Se o equipamento Omega possuísse uma precisão de medida de diferença de fase de 4º, a exatidão na medida, sobre a linha base, seria de 163,40 metros. Essa precisão diminuiria ao se afastar da linha base, em virtude do aumento do espaçamento correspondente a um corredor. 1320 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação 36.6 SISTEMA DECCA DE NAVEGAÇÃO O Sistema Decca de Navegação tem como característica única o fato de ter sido de propriedade e operado, até o final da década de 1980, por uma empresa privada, a “RacalDecca Navigator Company Limited”, baseada em Londres, UK. O sistema foi originalmente concebido, em 1937, por um engenheiro norte-americano, W. J. O'Brien, tendo sido desenvolvido pelo Almirantado Britânico. Seu primeiro uso prático foi na navegação dos navios varredores e navios de desembarque na invasão aliada da Normandia, em 1944, na 2a Guerra Mundial. A Companhia “Decca Navigator”, criada em 1945, aperfeiçoou o sistema e estabeleceu a primeira rede comercial Decca no sudeste da Inglaterra, em 1946. A cobertura atual do sistema Decca, na Europa, Canadá, Golfo da Guiné, sul da África, Golfo Pérsico, Índia, Austrália e Extremo Oriente, está mostrada na figura 36.12. O sistema Decca utiliza o princípio da medida de diferença de fase entre sinais recebidos, para determinação das LDP. O sistema emprega redes (cadeias) de estações, cada uma formada por uma estação Mestra em combinação com até três Escravas, ou Secundárias. O sistema Decca usa ondas contínuas não moduladas (CW). A grade hiperbólica é formada pelas linhas de diferença de fase dos sinais transmitidos pela Mestra e pelas Escravas. Figura 36.12 – Cobertura do Sistema DECCA (46 Cadeias) Todas as estações Decca operam em baixas freqüências, na faixa de LF (“low freqüency”), entre 70 kHz e 130 kHz. O alcance nominal do sistema é considerado como de 240 milhas da estação Mestra, tanto durante o dia como no período noturno. A interferência das ondas celestes normalmente torna o sistema não utilizável além deste limite. Em condições excepcionais, o sistema pode ser usado até cerca de 450 milhas das estações. Assim, o Decca pode ser descrito como um sistema de navegação eletrônica de curto e médio alcance (em comparação, por exemplo, com o sistema de longo alcance GPS, que proporciona cobertura mundial). Enquanto o alcance do sistema Decca é algo limitado, esta desvantagem é compensada pela boa precisão e relativa simplicidade de obtenção das LDP Decca dentro da área de cobertura de cada cadeia. Navegação eletrônica e em condições especiais 1321 Sistemas Hiperbólicos de Navegação O erro médio quadrático (rms) máximo de uma LDP Decca dentro da área coberta por uma cadeia do sistema é dado na tabela abaixo DISTÂNCIA EM MILHAS DA ESTAÇÃO MESTRA 100 150 200 240 ERRO MÉDIO DA LDP EM METROS DE DIA DE NOITE 30 100 60 350 100 700 150 1.200 Em condições favoráveis, o erro nas posições Decca pode ser inferior a 50 metros, até 50 milhas das estações. Em zonas restritas, próximo do centro da cadeia, o rigor pode ser da ordem de ± 15 metros. Das 50 para as 240 milhas, o rigor das posições obtidas diminui substancialmente, sendo, no limite exterior, da ordem de ± 2 milhas. Entre as 240 e as 450 milhas só é, normalmente, utilizável uma linha de posição. 36.7 PRINCÍPIO BÁSICO DE FUNCIONAMENTO DO SISTEMA DECCA As estações transmissoras Decca estão agrupadas em cadeias constituídas por uma estação Mestra, à qual estão associadas duas ou três estações Escravas (Secundárias), situadas a distâncias de 60 a 120 milhas. Idealmente, cada cadeia deveria estar geograficamente distribuída de acordo com o “padrão estrela” (“star pattern”), ou seja, as estações Secundárias deveriam dispor-se em torno da Mestra com um espaçamento angular da ordem de 120º entre cada linha base Mestra–Escrava; contudo, as condições geográficas ou a cobertura pretendida fazem variar consideravelmente a posição relativa das estações. As estações Secundárias tomam as designações de Vermelha (Encarnada), Verde e Púrpura (Violeta). As hipérboles Decca são impressas sobre cartas de navegação (Cartas Decca), na mesma cor da estação Secundária que constitui o par com a Mestra, isto é, vermelhas (encarnadas), verdes e púrpuras. O espaço compreendido entre duas hipérboles consecutivas de diferença de fase nula é denominado corredor (figura 36.13). A cada cadeia Decca é atribuída uma freqüência fundamental (f), de valor compreendido entre 14,00 kHz e 14,33 kHz, que é um submúltiplo inteiro das freqüências realmente irradiadas pelas estações; esses harmônicos são usados para simplificar o processo de comparação de fase pelo qual são obtidas as LDP Decca. Numa cadeia Decca, a relação harmônica entre a freqüência fundamental (f) e a freqüência de trabalho das estações é a seguinte: a Mestra transmite na freqüência 6f; a Escrava Vermelha (Encarnada) na freqüência 8f; a Escrava Verde na freqüência 9f; e a Púrpura na freqüência 5f. O receptor Decca consiste, na realidade, de quatro receptores separados, cada um dos quais pode ser sintonizado para receber uma das quatro estações que constituem uma 1322 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação cadeia, pela simples seleção da freqüência fundamental (f) correspondente a essa cadeia. No receptor, os sinais para cada par Mestra/Escrava são eletronicamente multiplicados até uma única freqüência de comparação de fase. Assim, a freqüência 6f da Mestra é multiplicada por 4 e a freqüência 8f da Vermelha (Encarnada) por 3, para obter uma freqüência comum de comparação de fase para o par Mestra/Vermelha de 24f; ao mesmo tempo, a freqüência 6f da Mestra é, também, em outra parte do receptor, multiplicada por 3 e a freqüência 9f da Verde por 2, para produzir uma freqüência de comparação de fase do par Mestra/Verde de 18f; simultaneamente, de maneira similar, a freqüência 6f da Mestra é multiplicada por 5 e a freqüência 5f da escrava Púrpura é multiplicada por 6, de modo a produzir uma freqüência de comparação de fase do par Mestra/Púrpura igual a 30f. As diferenças de fase resultantes da comparação para cada par de estações Mestra/Escrava da cadeia selecionada são indicadas em instrumentos de medida, denominados decômetros (um para cada par de estações Mestra/Escrava), proporcionando três LDP Decca. Figura 36.13 – Cadeia DECCA Os decômetros utilizados na medida das diferenças de fase permitem determinar diferenças de ângulos de fase entre os sinais da ordem dos 3º a 3,5º, ou seja, podem individualizar cerca de 100 hipérboles de posição em cada corredor (360º de fase). Por essa razão, os decômetros são graduados em centésimos de corredor (“centilanes”). 36.8 IDENTIFICAÇÃO DOS CORREDORES DECCA Na figura 36.14, está ilustrada a comparação de fase entre os sinais da estação Mestra e da escrava Verde (na freqüência de comparação 18f), estando mostrados 2 corredores (cada um equivalente a meio comprimento de onda, ou l/2). No corredor da esquerda, um receptor está localizado em uma posição onde a diferença de fase medida entre o par Mestra/Verde é de 180º; então, o receptor deve estar situado em um ponto no meio do Navegação eletrônica e em condições especiais 1323 Sistemas Hiperbólicos de Navegação corredor. No corredor da direita, a diferença de fase medida é de 90º; assim, o receptor está situado a 0,25 da largura do corredor, a partir da Mestra, na direção da escrava Verde. Entretanto, apenas com a medida da diferença de fase ficaria impossível determinar em que corredor o receptor está localizado. A medida da diferença de fase de 180º, por exemplo, colocaria o receptor no meio de qualquer corredor do par de estações Mestra/ Escrava, ou seja, a medida somente da diferença de fase conduz à ambigüidade (a cada valor medido correspondem tantas hipérboles quantos são os corredores existentes entre o par de estações considerado). Portanto, torna-se necessário dispor de uma informação adicional que permita identificar o corredor em que está situado o navio. Figura 36.14 – Diferenças de Fase num Corredor DECCA A comparação de fase entre a Mestra e a escrava Verde é, como vimos, feita na freqüência 18f. Se a freqüência fundamental for de 14,00 kHz, a freqüência de comparação será de 252 kHz e o comprimento de onda (l) de 1.190,48 m. Assim, o corredor Decca (l/2) terá, na linha base, a largura de 595,24 metros. Então, para identificar o corredor em que está o navio, teríamos que conhecer nossa posição estimada com uma precisão de cerca de 300 metros (1/2 corredor), o que tornaria dispensável a utilização do Decca. No sistema Decca, a identificação do corredor é obtida pela transmissão de um sinal de identificação de corredor, de 0,6 segundo de duração, emitido a cada 20 segundos pela Mestra e por todas as Escravas de uma cadeia. Os sinais de identificação de corredor são combinados no receptor de modo a produzir um trem de pulsos na freqüência fundamental (f) da cadeia de estações. Fica gerada, assim, uma rede hiperbólica mais larga para cada par. Um corredor na freqüência fundamental (f), considerada de 14,00 kHz, tem uma largura na linha base de 10.714,29 metros, o que corresponde a 18 corredores na freqüência de comparação Mestra/Verde (18f), como mostrado na figura 36.15. A faixa compreendida entre duas hipérboles de diferença de fase nula na freqüência fundamental (f) é denominada zona. Sendo constante para todas as cadeias Decca a relação harmônica das freqüências de comparação para cada par (18f, 24f e 30f), e sendo sempre f a freqüência de identificação, resulta que cada zona contém sempre o mesmo número de corredores, em qualquer cadeia: 18 corredores Verdes, 24 corredores Vermelhos e 30 corredores Púrpuras. Na figura 36.15, por exemplo, a comparação de fase dos sinais de identificação de corredor da Mestra e da escrava Verde indicam que o receptor está localizado no quinto 1324 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação corredor contido pela zona, medido a partir da Mestra, na direção da escrava Verde. Dentro do corredor, a diferença de fase é de 90º. Figura 36.15 – Identificação do Corredor DECCA Além do sinal de identificação de corredor acima descrito, as estações Decca transmitem, durante cada ciclo de 20 segundos, um sinal de identificação de zona, em uma freqüência igual a 8,2f (sendo f a freqüência fundamental da cadeia). Esta freqüência, denominada freqüência laranja, é comparada, em receptores convenientemente equipados, com a freqüência 8f, para formar um padrão hiperbólico ainda mais largo, no qual 360º de diferença de fase compreendem 5 zonas. Medida esta diferença de fase, o receptor identifica em que zona o navio está localizado. 36.9 DESIGNAÇÃO DE CORREDORES E ZONAS DECCA Para fins de identificação, em cada cadeia Decca as zonas são designadas por uma letra, de A até J, recomeçando em A quando ao par correspondem mais de 10 zonas. Cada corredor dentro de uma zona é identificado por números, começando do lado da estação Mestra. A numeração é atribuída do seguinte modo: · CORREDORES VERMELHOS: 0 a 24; · CORREDORES VERDES: 30 a 48; e · CORREDORES PÚRPURAS: 50 a 80. Os decômetros típicos (um para cada par) têm dois mostradores: o mostrador externo indica o corredor, estando subdividido em tantas divisões quantos forem os corredores existentes em cada zona. O mostrador interno, contendo 100 divisões, indica a diferença de fase entre os sinais que compõem o par, em centésimos de corredor (“centilanes”). Além disso, é indicada, também, a zona em que se encontra o navio, em uma janela no medidor. Navegação eletrônica e em condições especiais 1325 Sistemas Hiperbólicos de Navegação 36.10 OBTENÇÃO E PLOTAGEM DA POSIÇÃO DECCA Uma linha de posição Decca será, então, identificada por: – Letra correspondente à zona Decca em que se encontra o navio; – número de 0 a 80, que individualiza o corredor em que está o navio dentro da zona, identificando-o simultaneamente como VERMELHO, VERDE ou PÚRPURA; e – número centesimal (“centilanes”) que corresponde à diferença de fase entre os sinais do par e que define a LDP dentro do corredor. EXEMPLO: Linha de posição Decca F. 14,40 significa (figura 36.16): – LDP Vermelha (par Mestra/Escrava Vermelha); – Zona F; – Corredor 14; – Hipérbole (LDP) 14,40. Figura 36.16 – LDP DECCA Vermelho F. 14,40 Num decômetro típico, o ponteiro grande indica, no mostrador externo do dial, o valor do corredor Decca; o ponteiro pequeno indica, no mostrador interno, os centésimos de corredor. A letra que indica a zona Decca aparece em uma janela no dial. Na figura 36.17, por exemplo, a zona I aparece na janela do dial; o ponteiro grande indica o corredor número 16 (Vermelho); o ponteiro pequeno indica os centésimos de corredor (0,30). Assim, a LDP Decca será: I. 16,30 (Vermelho, zona I, corredor 16, hipérbole 16,30). O modelo atual de receptor Decca de bordo, designado MK 21, mostrado na figura 36.18, incorpora três decômetros, um para cada par da cadeia Decca (Vermelho, Verde e Púrpura) e um mostrador LED que apresenta o valor do corredor para cada par da cadeia, três vezes por minuto. Quando o receptor é ajustado para uma determinada cadeia Decca, os decômetros passam a indicar leituras contínuas da zona, corredor e centésimos de corredor, para cada par de estações, até que o navio saia do alcance da cadeia. No modelo MK 21, as leituras de fração de corredor (centésimos de corredor) são apresentadas em mostradores circulares; o número do corredor e a letra de identificação da zona aparecem em uma janela situada logo acima de cada mostrador circular. 1326 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação Figura 36.17 – Decômetro Típico (Indicação: Vermelho I. 16.30) DECCA CO-ORDINATE RED I. 16.30 Figura 36.18 – Receptor DECCA MK-21 Navegação eletrônica e em condições especiais 1327 Sistemas Hiperbólicos de Navegação Além disso, conforme mencionado, a identificação de corredor também é apresentada seqüencialmente, sob a forma numérica, no mostrador LED retangular existente sob o decômetro da esquerda. Essa indicação de corredor, em conjunto com a posição estimada (para a identificação da zona Decca), é utilizada para inicializar as janelas dos decômetros. Os valores das LDP Decca são plotados, como segmentos de LDP hiperbólica, na Carta Decca, onde estão representados os padrões hiperbólicos correspondentes aos três pares de estações da cadeia em uso. Um exemplo de plotagem de posição Decca está mostrado na figura 36.19. Figura 36.19 – Plotagem de Posição DECCA As linhas de posição Decca são impressas sobre cartas náuticas regulares, em vermelho, verde e púrpura, para identificar o par de estações da cadeia a que se referem. As hipérboles limites de zona são, normalmente, impressas em traço mais grosso. Estas cartas especiais são chamadas de Cartas Decca. Existem, ainda, equipamentos de plotagem (“plotters”) automáticos, projetados para plotar as posições Decca e traçar continuamente a derrota do navio sobre uma folha de plotagem, usando informações fornecidas pelo receptor Decca. 36.11 FUTURO DO SISTEMA DECCA Como vimos, o Decca apresentava a característica única de ser um sistema de navegação de propriedade de uma empresa privada. O equipamento Decca era instalado e 1328 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação mantido a bordo, em regime de aluguel, pela Decca Navigator Co. Ltd., responsável, também, pela operação e manutenção das cadeias de estações. Hoje, a operação do sistema é subsidiada pelo Governo Britânico. O uso do Decca, principalmente por navios mercantes e barcos pesqueiros operando ao largo da Terra Nova, no Mar do Norte, no Canal da Mancha e no Mar do Japão, é tão intenso que pode-se prever que o sistema permanecerá em operação, a despeito da disponibilidade do GPS. 36.12 SISTEMA LORAN-C DE NAVEGAÇÃO O Sistema LORAN-C (abreviatura de “Long-Range Navigation”) foi originalmente desenvolvido pelos Estados Unidos em 1940, tendo constituído uma das primeiras tentativas de implementação de um sistema hiperbólico de navegação de longo alcance, capaz de proporcionar, continuamente e em qualquer condição de tempo, informação de posicionamento para navios ou aeronaves. A Segunda Guerra Mundial e a Guerra da Coréia aceleraram o estabelecimento do sistema, inicialmente denominado de LORAN-A. O sistema original evoluiu para o atual LORAN-C. As principais estações LORAN-C tornaram-se operacionais em 1957. O sistema foi gradualmente aprimorado e expandido, até que, no final da década de 1970, sua cobertura por ondas terrestres estendia-se sobre a maioria das regiões costeiras do Atlântico Norte, com ondas celestes alcançando a maior parte do Hemisfério Norte, com exceção do Oceano Índico e do Pacífico NW. A U.S. Coast Guard é a responsável pela operação do LORAN-C. A cobertura atual do sistema é mostrada na figura 36.20. Figura 36.20 – Cobertura do Sistema Loran-C ONDAS TERRESTRES ONDAS CELESTES Navegação eletrônica e em condições especiais 1329 Sistemas Hiperbólicos de Navegação 36.13 PRINCÍPIO DE FUNCIONAMENTO DO LORAN-C O LORAN-C é um sistema hiperbólico de radionavegação, de longo alcance, que utiliza pulsos de radiofreqüência da faixa de LF (freqüência básica de 100 kHz). O sistema é baseado na medida da diferença do tempo de recepção de sinais transmitidos por duas estações. Como vimos, se um receptor a bordo for capaz de medir a diferença de tempo de recepção de sinais transmitidos sincronizadamente por duas estações, ficará determinada uma LDP hiperbólica (definida como o lugar geométrico de todos os pontos que têm a mesma diferença de distâncias para as duas estações), pois a uma dada diferença de tempo de chegada dos sinais no receptor de bordo corresponderá uma determinada diferença de distâncias das estações transmissoras. Assim, as linhas de posição do LORAN-C são hipérboles que representam o lugar geométrico dos pontos que apresentam a mesma diferença de tempo de recepção de sinais emitidos sincronizadamente por duas estações. São necessárias duas estações para se determinar uma linha de posição LORAN-C, sendo esta definida pela diferença de tempo entre a chegada dos pulsos das duas estações e pela diferença de fase entre esses mesmos impulsos. A diferença de tempo corresponde à determinação da LDP sem problemas de ambigüidade; a medição da diferença de fase subseqüente permite melhorar o rigor dessa determinação. A precisão do sistema depende da exatidão da sincronização dos sinais transmitidos, da capacidade do receptor de medir a diferença de tempo entre a recepção dos dois sinais (TD – “time difference”) e do conhecimento da velocidade de propagação dos pulsos transmitidos, de modo que as diferenças de tempo possam ser convertidas em diferenças de distâncias. Originalmente, o LORAN-C operava utilizando o conceito de que a recepção do pulso transmitido pela estação Mestra é que disparava as emissões seqüenciais das estações Escravas a ela associadas, em uma determinada cadeia. Hoje, entretanto, padrões atômicos de tempo nas estações regulam todas as transmissões de cada cadeia com maior exatidão, garantindo uma precisa sincronização das emissões. Além disso, a precisão do LORAN-C deriva da exatidão com que o receptor é capaz de medir as diferenças de tempo de recepção dos pulsos de radiofreqüências e da estabilidade da propagação das ondas LF, que também proporcionam longo alcance. A freqüência básica do sistema, como vimos, é 100 kHz. Todas as estações LORAN-C transmitem sinais com uma freqüência comum de 100 kHz, com uma largura de faixa estendendo-se até 10 kHz para cada lado. O alcance das ondas terrestres do LORAN-C é de 800 a 1.200 milhas, dependendo da potência da estação, do nível de ruído na área, da sensibilidade do receptor e da atenuação no trajeto estação–receptor. Ondas ionosféricas de uma reflexão têm um alcance de 2.000 a 2.300 milhas; ondas celestes de dupla reflexão na ionosfera já foram recebidas a 4.000 milhas das estações transmissoras. Ondas celestes de uma reflexão são produzidas de dia e de noite, enquanto ondas de dupla reflexão ocorrem apenas no período noturno. A precisão do LORAN-C na área de cobertura das ondas terrestres varia de ± 200 metros (cerca de 700 pés), próximo da linha base, até ± 450 metros (cerca de 1.500 pés), no limite da área coberta pelas ondas terrestres (95% de probabilidade). Para além do limite de recepção das ondas terrestres, podem-se utilizar as ondas celestes, embora com uma diminuição considerável na precisão das linhas de posição. 1330 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação As baixas freqüências e as altas potências de transmissão (mais de 1.500 kW em algumas estações) permitem que as ondas terrestres do LORAN-C, sob determinadas condições, penetrem nas camadas superficiais do mar, possibilitando sua recepção por submarinos submersos, na cota periscópica. 36.14 OPERAÇÃO DO SISTEMA LORAN-C a. CADEIAS LORAN-C Para que o utilizador possa determinar a sua posição, é necessário que obtenha pelo menos duas LDP (linhas de posição). Para que isso seja sempre possível, as estações LORAN-C são agrupadas em cadeias constituídas por uma estação Mestra (M) e duas ou mais estações Secundárias (ou Escravas), designadas pelas letras X, Y, Z e W. As estações de uma cadeia têm a localização e distribuição geográfica necessária para que, em qualquer ponto da área de cobertura, possam ser sempre recebidos os sinais da estação Mestra e de, pelos menos, duas estações Secundárias. Todas as estações LORAN-C estão equipadas com relógios atômicos (padrões de césio) que lhes permitem estabelecer individualmente os instantes de transmissão e a sincronização de fase, sem necessidade de que as Secundárias recebam, para referência e disparo de suas emissões, os sinais da estação Mestra. Com isso, nas cadeias atuais do LORANC as linhas-base puderam ser estendidas para distâncias entre 1.000 e 1.500 milhas náuticas. As estações das cadeias LORAN-C podem estar dispostas em triângulo (tríade), ou, quando existem mais de duas Secundárias, em “Y” ou em estrela (“star pattern”), ocupando, nesses casos, a estação Mestra uma posição central, com relação às Secundárias, como está representado na figura 36.21. Em cada cadeia pode existir uma ou mais estações monitoras, com equipamento receptor de alta precisão, onde se efetua continuamente a verificação das diferenças de tempo de cada par Mestra–Secundária. Estas estações podem originar a correção do instante de transmissão das estações Secundárias, se for constatada uma diferença igual ou superior à metade do valor da tolerância estabelecida, que é da ordem de 200 nanossegundos. Figura 36.21 – Cadeias LORAN-C b. FORMATO DO SINAL LORAN-C Os sinais das estações LORAN-C são formados por grupos de pulsos, sendo que a freqüência da onda portadora é de 100 kHz, estando 99% da energia irradiada contida entre as freqüências de 90 kHz e 110 kHz. A freqüência de transmissão do sinal LORAN-C requer uma potência muito elevada, para que a onda terrestre se propague até o longo alcance para o qual o sistema foi projetado. Além disso, nessa freqüência as ondas celestes Navegação eletrônica e em condições especiais 1331 Sistemas Hiperbólicos de Navegação se irradiam de uma forma tal que alcançam o receptor num período de tempo muito curto após a chegada da onda terrestre, praticamente em qualquer ponto da área de cobertura de uma determinada cadeia. Para reduzir os requisitos de grandes potências, o LORAN-C utiliza um sinal composto por pulsos múltiplos (“multipulsed signal”). Cada transmissão de uma estação Mestra consiste, na realidade, de 9 pulsos; os oito primeiros são separados entre si por intervalos de 1.000 ms, e o nono pulso por 2.000 ms. Cada estação Secundária transmite 8 pulsos, separados entre si por intervalos de 1.000 ms. O pulso extra do sinal da Mestra é usado para identificação dessa estação e indicação de problemas na cadeia LORAN-C. No receptor LORAN-C, os oito pulsos básicos de cada sinal são integrados eletronicamente, de modo a formar pulsos de alta intensidade, da Mestra e das estações Secundárias (Escravas), de 300 ms de duração aproximada. Tais pulsos, então, são eletronicamente comparados, para obter as diferenças de tempo. Para eliminar a contaminação, ou interferência, das ondas celestes, os pulsos integrados da Mestra e das estações Secundárias são comparados num ponto de amostragem situado exatamente a 30 ms do bordo de vante do pulso. Assim, a medida das diferenças de tempo é feita antes que qualquer onda celeste refletida possa alcançar o receptor. O formato do pulso integrado LORAN-C está mostrado na figura 36.22. Figura 36.22 – Pulso Integrado LORAN-C Os sinais de pulsos múltiplos da Mestra e das estações Secundárias de uma cadeia LORAN-C são transmitidos em uma seqüência predeterminada, como mostrado na figura 36.23. A seqüência é calculada de forma que o sinal da Mestra alcance cada uma das estações Secundárias da cadeia antes que estas emitam seus sinais. Além disso, um atraso de código é incluído entre as transmissões das Secundárias, de modo a assegurar que todas as emissões sejam recebidas na mesma seqüência, em toda área coberta pela cadeia. O intervalo de tempo entre dois inícios consecutivos de transmissão da Mestra é denominado Intervalo de Repetição do Grupo de Pulsos (IRG). Cada cadeia LORAN-C tem um IRG (conhecido, em inglês, como GRI, “group repetition interval”) diferente, expresso em microssegundos. Como as durações das transmissões da Mestra e das Secundárias são fixas, o IRG depende dos intervalos de tempo entre emissões, ou seja, dos atrasos fixos e de código, que são calculados, conforme vimos, de tal maneira que, dentro da cobertura de uma cadeia LORAN-C, não é possível a recepção fora da ordem da transmissão. Assim, numa cadeia constituída pela Mestra M e três Secundárias X, Y e Z, as estações 1332 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação transmitem nesta seqüência e, em qualquer ponto da área de cobertura, os pulsos emitidos também serão sempre recebidos nessa mesma seqüência: M, X, Y e Z. Então, cada estação Secundária atrasa sua emissão de um tempo especificado, denominado atraso de código da Secundária. O receptor LORAN-C leva em conta este atraso de código conhecido, quando mede a diferença de tempo (DT) de recepção dos sinais da Mestra e das Secundárias, para determinar as LDP LORAN. Figura 36.23 – Formato do Sinal LORAN-C IRG = Intervalo de repetição do grupo; DTX = diferença de tempo do par X; DTY = diferença de tempo do par Y; DTZ = diferença de tempo do par Z. c. IDENTIFICAÇÃO DA CADEIA E DAS LDP LORAN-C Cada cadeia LORAN-C é identificada pelos 4 primeiros dígitos de seu IRG, expresso em microssegundos; a estação Secundária é identificada pela adição ao IRG de um sufixo, correspondente à sua letra de designação. Assim, o código 7970-X designa o par Mestra–Secundária X, da cadeia cujo IRG é 79.700 ms (cadeia do Mar da Noruega). Uma diferença de tempo (DT) observada é acrescentada ao código básico acima citado, definindo de maneira completa uma LDP LORAN-C. Por exemplo, a LDP 9960-X-26450 representa: – uma LDP hiperbólica correspondente a uma diferença de tempo (DT) de 26.450 microssegundos, entre a recepção do sinal da Mestra e da Secundária X; – na cadeia LORAN-C cujo IRG é 99.600 ms (cadeia Nordeste dos Estados Unidos). 36.15 USO DAS ONDAS CELESTES NO LORAN-C Como vimos, a precisão do LORAN-C é obtida pelo uso da onda terrestre, mas as ondas celestes, refletidas na ionosfera, também estão sempre presentes (figura 36.24). Na área de cobertura da onda terrestre, a interferência das ondas celestes causa distorção na recepção, sob a forma de enfraquecimento do sinal (“fading”) e mudanças no formato do pulso. O formato do sinal LORAN-C e o projeto dos receptores do sistema Navegação eletrônica e em condições especiais 1333 Sistemas Hiperbólicos de Navegação procuram evitar a contaminação da onda ionosférica, a fim de eliminar os erros causados por essa interferência. Entretanto, as ondas celestes proporcionam um valioso aumento do alcance do LORAN-C, embora com menor precisão de posicionamento. Assim, para além do alcance da onda terrestre pode-se utilizar a onda ionosférica, sendo, então, necessário aplicar correções às leituras de diferença de tempo (DT) obtidas no receptor. Essas correções constam das Cartas LORAN-C. Figura 36.24 – Onda Terrestre e Onda Celeste 36.16 OBTENÇÃO E PLOTAGEM DA POSIÇÃO LORAN-C O receptor mede duas ou mais diferenças de tempo entre a recepção dos pulsos da Mestra e das Secundárias da cadeia LORAN-C que cobre a área, definindo duas ou mais linhas de posição hiperbólicas. A posição do receptor estará na interseção das LDP (figura 36.25). Obtidas as diferenças de tempo (DT) que constituem as LDP, a posição será plotada na Carta LORAN-C que apresenta os padrões hiperbólicos da cadeia, traçando, como linhas retas, pequenos segmentos de LDP hiperbólicas, de maneira semelhante ao procedimento adotado para plotagem de uma posição Decca. Para facilitar a interpolação das LDP entre duas hipérboles representadas, as Cartas LORAN-C incluem um interpolador linear (figura 36.26), cujo uso é idêntico ao do interpolador Omega (ver o Apêndice a este Capítulo). Por exemplo, na Carta LORAN-C da figura 36.27 está plotada a posição de 1715 horas, definida pelas seguintes LDP (DIFERENÇAS DE TEMPO): 9930 – X – 37.975,0 9930 – Y – 70.025,0 9930 – Z – 49.181,0 A Carta LORAN-C deve ser examinada, de modo a determinar quais sinais devem ser usados, para proporcionar uma boa geometria para a posição (ângulos de corte das LDP ³ 30º). 1334 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação Figura 36.25 – Geometria da Posição Hiperbólica LORAN-C DTX – LUGAR GEOMÉTRICO DE TODAS AS POSIÇÕES DE DIFERENÇA DE TEMPO DE RECEPÇÃO DOS SINAIS DE M E DE X CONSTANTE DTY – LUGAR GEOMÉTRICO DE TODAS AS POSIÇÕES DE DIFERENÇA DE TEMPO DE RECEPÇÃO DOS SINAIS DE M E DE Y CONSTANTE Figura 36.26 – Interpolador Linear LORAN-C Navegação eletrônica e em condições especiais 1335 Sistemas Hiperbólicos de Navegação Figura 36.27 – Carta LORAN-C Se for obtida apenas uma diferença de tempo (DT), a LDP LORAN-C determinada poderá ser cruzada com uma LDP obtida por outro meio, para definir a posição do navio. As cartas LORAN-C atualmente existentes são, na sua quase totalidade, cartas náuticas comuns, tendo sobreimpressas as redes hiperbólicas LORAN-C. Estas cartas são corrigidas pelos Avisos aos Navegantes e podem, portanto, ser utilizadas para efetuar a navegação. As redes hiperbólicas são impressas em diferentes cores a intervalos de 20, 50, 100 ou 200 microssegundos, conforme a escala da carta. As linhas de posição correspondentes às leituras do receptor só raramente coincidirão com as hipérboles impressas na carta, sendo, portanto, necessário interpolar. A interpolação deve ser sempre feita a partir da hipérbole impressa mais próxima da leitura e utilizam-se para isso os interpoladores gráficos também impressos nas próprias cartas, conforme anteriormente mencionado. As cartas contêm, também, as correções em microssegundos para aplicar às leituras, no caso de se utilizar a onda ionosférica. 36.17 RECEPTORES LORAN-C Nos últimos 20 anos houve um grande desenvolvimento tecnológico nos receptores LORAN-C, que resultou em receptores compactos, quase que totalmente automáticos e 1336 Navegação eletrônica e em condições especiais Sistemas Hiperbólicos de Navegação de preço acessível (US$ 500 a US$ 1,000 para diversos modelos). Muitos receptores incorporam computadores que proporcionam leitura digital direta da Latitude e Longitude da posição, com precisão de décimo de minuto de arco. Além disso, fornecem rumo e velocidade no fundo; rumo, distância e tempo para o próximo ponto da derrota ou para o ponto de destino; rumo e velocidade da corrente, etc. Uma vez ligados e inicializados, esses receptores selecionam automaticamente a melhor cadeia LORAN-C a utilizar, baseado na intensidade dos sinais na área, e a melhor combinação de pulsos Mestra–Secundária, a fim de obter uma boa geometria para as posições (figura 36.28). Figura 36.28 – Receptor Automático LORAN-C Outros equipamentos combinam, em um mesmo aparelho, receptores dos sistemas LORAN-C e GPS, aproveitando as vantagens de ambos e utilizando um como “back-up” do outro (figura 36.29). Figura 36.29 – Receptor Combinado LORAN-C e GPS The Precision Navigation LORAN-C / GPS Receiver System Os receptores básicos do sistema, contudo, fornecem somente as diferenças de tempo (DT), que são usadas como LDP para plotagem das posições, nas Cartas LORAN-C. Navegação eletrônica e em condições especiais 1337 Sistemas Hiperbólicos de Navegação 36.18 O FUTURO DO LORAN-C O LORAN-C continua intensamente utilizado, tanto na navegação marítima como na navegação aérea. De fato, estima-se que existam hoje mais de 70.000 utilizadores aeronáuticos do LORAN-C, o que excede o número de usuários marítimos. Como conseqüência, duas novas cadeias LORAN-C foram instaladas no Oeste dos Estados Unidos, completando a cobertura do sistema sobre todo o território continental daquele país. Assim, espera-se que o LORAN-C permaneça operacional ainda por vários anos. 1338 Navegação eletrônica e em condições especiais